ThomasVontobel



Drei fast baugleiche Roboter mit identischen Verhaltensprogrammen zirkulieren im knapp bemessenen Kanalabschnitt: zahm, defensiv, gestresst, aggressiv, passiv.
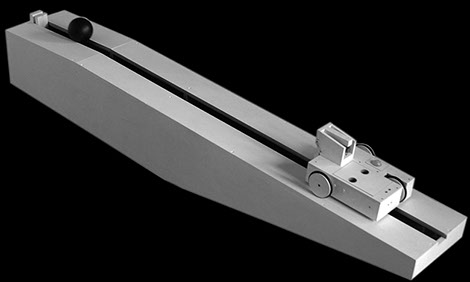
Sisyphus schiebt die Kugel reflexartig die Rampe hoch und kann sie oben positionieren. Während der Rückfahrt in seine Ruheposition am unteren Ende der Rampe, bringt der Roboter das System wenig zum Kippen, was die Kugel erneut auf ihn zu rollen lässt und ihn zu neuer Arbeit zwingt.
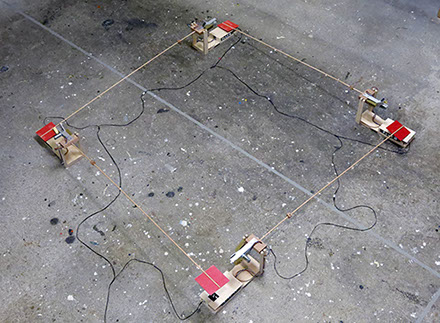
Vier feine Arme bilden ein Geviert, bei dem jeder Arm den Fuss des Nachbararmes mit der roten Fläche berührt. Dieses System zeigt gegen aussen keine Aktivität. Sobald aber ein Kontakt unterbrochen wird, startet ein nicht enden wollender Ablauf sich hebender und sich senkender Arme.
Die waagrecht gelagerte Kreisscheibe wird durch den an ihr angebrachten Arm mit Propeller in Rotation versetzt. Der auf die Kreisfläche gesetzte Arm schleift eine immer tiefere Rille in die Scheibe, was längerfristig ein Auseinanderfallen des Systems verursacht.
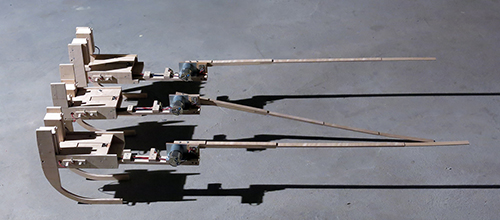
Drei baugleiche Roboter mit identischen Verhaltensprogrammen wechseln zwischen Stehen und Liegen. Auslöser ihrer Aktivität sind akustische Ereignisse und ihre innere Uhr.
Die Schallempfindlichkeit der Roboter ist anfänglich sehr gering und wird im Verlauf des Wartens grösser. Nach erfolgter Aktivität ist die Empfindlichkeit zunächst wieder gering.
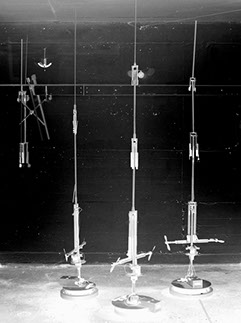
Schlanke, gelenkige, gut ausbalancierte Figuren auf drehbaren Füssen stehen in passivem Zustand senkrecht. Kurze, gezielte Impulse von Luftschrauben versetzen die Figuren in harmonische Bewegungen.
Der autonom agierende, analog gesteuerte Roboter zeigt ein lichthungriges Verhalten und wendet sich von Hindernissen ab.
Tritt eine Vielzahl dieser künstlichen Wesen auf, entsteht ein Schwarm.
Die Bewegungssteuerung direkt über Sensorstimulation entstammt einer Idee des Kybernetikers Braitenberg.
Zwei Gabelstapler zirkulieren auf der labil gelagerten Palette. Die Fahrzeuge reagieren mit der Zeit sensibel auf die Ausrichtung ihrer gemeinsamen Unterlage und es gelingt ihnen, früher oder später, eine Balance zu erreichen und zu halten. Der Zustand des Gleichgewichtes wird nach nicht genau vorhersehbarer Zeit durch erneute Aktivität eines Gabelstaplers zerstört.